Blue – een cobot voor AI
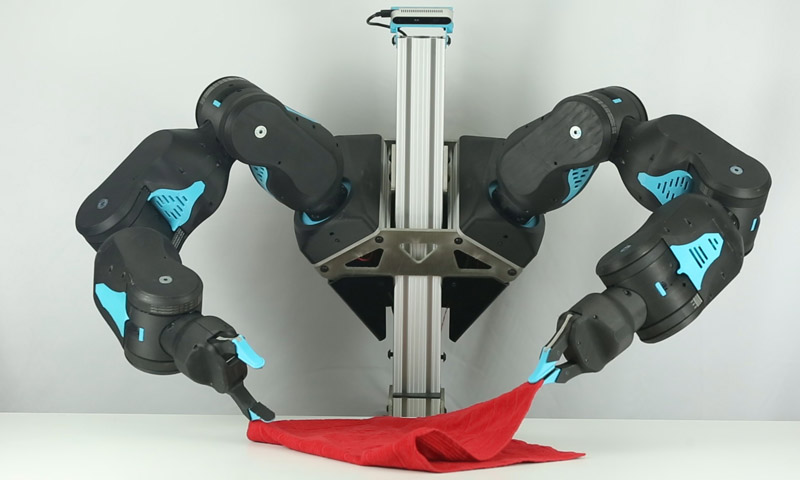
Berkeley Open Arms – een spin-off van de University of California, Berkeley – brengt met Blue een nieuwe cobot op de markt die speciaal ontworpen is voor gebruik met artificiële intelligentie. De robot integreert een aantal nieuwe inzichten zoals het gebruik van quasi-direct drive actuatoren die tegen een stootje kunnen. Wat dan weer nodig is voor de onhandige manier van leren van de robot.
Het gebruik van artificiële intelligentie voor het aansturen van robots is al langer een onderzoeksdomein aan de Berkeley universiteit. Wat men daarbij beoogt is dat een robot in staat zou zijn om zelf de programma’s te genereren die nodig zijn om nieuwe taken uit te voeren. Het principe van reinforced learning dat daarbij toegepast wordt, is enigszins vergelijkbaar met de manier waarop wij allen destijds hebben leren lopen, fietsen en zwemmen.
Als controller gebruikt zo een robot een neuraal netwerk als alternatief op een klassiek algoritme. Reinforced learning houdt in dat het neuraal netwerk zelf al doende zijn parameters bijstelt tot er een optimaal algoritme bekomen wordt. Om zelf te kunnen leren wat goed is en wat niet moet zo een robot dus ook feedback krijgen. Daarbij wordt typisch een visiesysteem gebruikt.
Streven naar goede feedback
Stel bijvoorbeeld dat de robot als taak krijgt om een dop op een flesje te schroeven. De robot moet dan in eerste instantie het dopje opnemen en om dat aan te leren kan een camera kijken hoe ver de grijper verwijderd is van het dopje. Als de robot beweegt en die afstand wordt groter, krijgt hij negatieve feedback. Zodra de camera ziet dat de grijper in de richting van het dopje gaat, wordt positieve feedback gegeven.
De enige regel die de robot dus nodig heeft is van te streven naar zoveel mogelijk goede feedback. Vanaf dan kan hij zelf beginnen zoeken en zal hij vrij snel ontdekken dat hij die kan krijgen door naar het dopje te bewegen, het vast te grijpen, op het flesje te zetten en ten slotte vast te schroeven. Het algoritme dat hiervoor nodig is ontstaat dus op een organische manier en heeft het voordeel van heel flexibel te zijn. Als het dopje een volgende keer ergens anders ligt, zal hij automatisch naar die nieuwe locatie grijpen.
Verende actuatoren
Een van de nadelen van deze methode is dat de robot in het begin van zijn leerproces erg onhandig kan zijn en nogal wat botsingen kan veroorzaken. Van de meeste cobots weten we dat ze aanrakingen detecteren en daarop kunnen reageren teneinde operatoren niet te verwonden, maar dat betekent daarom nog niet dat de robot zelf tegen botsingen bestand is.
Daarom ontwikkelden de onderzoekers een eigen cobot – die de naam Blue kreeg – met de uitdrukkelijke vereiste dat die beter bestand zou moeten zijn tegen botsingen. Met verende actuatoren kan dit bereikt worden, iets wat eerder ook al toegepast werd in de Baxter robot van Rethink Robotics. Maar verende actuatoren hebben het nadeel dat ze minder nauwkeurig zijn en minder dynamisch, wat ook de reden is waarom de Baxter robot nooit een succes werd en Rethink Robotics uiteindelijk moest stoppen als zelfstandig bedrijf.
Quasi-directe aandrijvingen
De oplossing die in Blue wordt toegepast, zijn zogenaamde quasi-directe aandrijvingen. Die maken gebruik van motoren met een hoog koppel en transmissies met kleine overbrengingsverhouding. Die transmissies – in Blue wordt een overbrenging met een riem gebruikt – zijn redelijk robuust terwijl ze tegelijk ook voldoende dynamisch zijn. Er wordt wel nog wat ingeboet aan nauwkeurigheid, maar dat wordt dan weer automatisch opgevangen door het flexibele controlealgoritme op basis van AI.
Een bijkomend voordeel van de transmissie met riemen is dat men de motoren in de armen hoger in de schouder kan plaatsen zodat de bewegende delen lichter worden wat dan ook weer de dynamiek ten goede komt.
Berkeley Open Arms is een nieuwe spin-off die opgericht werd om de cobot Blue op de markt te brengen. In eerste instantie richt het bedrijf zich tot onderzoekers in artificiële intelligentie om met de robot aan de slag te gaan en de toepassing van reinforced learning verder te ontwikkelen.
© Productivity.be, 06/02/2020
Feel free to share
Newsletter
News
Emerson’s New Comprehensive Automation Platform Empowers Decisive Action from Plant to Enterprise
Portable authenticity testing device detects food fraud at the point of sampling
Three trends set to drive cyber-attacks in 2024
TotalEnergies Partners with Major International Companies to Support e-NG Development
Schneider Electric Collaborates with NVIDIA on Designs for AI Data Centers
Apptronik and Mercedes-Benz Enter Commercial Agreement
Agenda
22/04 - 26/04: Hannover Messe, Hannover (D)
14/05 - 16/05: Advanced Manufacturing, Antwerp Expo (B)
15/05 - 16/05: Advanced Engineering, Antwerp Expo (B)
15/05 - 16/05: Food Tech Event, Brabanthallen, 's-Hertogenbosch (Nl)
28/05: Industrie & Maintenance, Namur Expo (B)
05/06 - 06/06: Vision, Robotics & Motion, Brabanthallen, 's-Hertogenbosch
10/06 - 14/06: ACHEMA, Frankfurt am Main (D)
18/09 - 19/09: Kunststoffen, Brabanthallen 's-Hertogenbosch (Nl)
08/10 - 11/10: Motek, Stuttgart (D)
15/09/25 - 19/09/25: Schweissen & Schneiden, Messe Essen (D)
08/10/25 - 15/10/25: K, Düsseldorf (D)