Collaborative robots
De term collaborative robots wordt gebruikt voor robots die gemaakt zijn om zonder fysieke afscherming te kunnen samenwerken met mensen. De vormgeving en sturing zijn aangepast om de impact bij een botsing te beperken. Bovendien bevatten ze systemen om aanraking te detecteren zodat ze daar gepast op kunnen reageren.
Zie ook Hoe detecteert een collaborative robot een aanraking?
De voorwaarden waaraan een collaborative robot moet voldoen, worden beschreven in de technische specificatie ISO/TS 15066.
Zie ook Risicoanalyse cobots volgens TS 15066.
Collaborative robots vinden steeds meer toepassingen in de industrie en zijn daar ook steeds beter aan aangepast. Een mooie illustratie hiervan is het volwaardig modulair end-of-arm pakket dat Schunk lanceerde voor de robotarmen van Universal Robots. Dat omvat een snelwisselsysteem, krachtopnemers en grijpers die op elkaar afgestemd zijn zodat ze snel en nauwkeurig uitgewisseld kunnen worden.
BionicCobot
De BionicCobot van Festo is zowel anatomisch als qua aandrijving volledig geïnpireerd op de menselijke arm. De zeven scharnierpunten van de cobot worden alle pneumatisch aangedreven met telkens een agonist en antagonist. Daarmee kunnen zowel de krachten als rigiditeit precies gecontroleerd worden.De BionicCobot wordt ontwikkeld door het Bionic Learning Network van Festo. Hij wordt aangestuurd door het open source platform ROS en de Festo Motion Terminal.
Meest krachtige collaborative robot
 De collaborative robots van FANUC zijn gebaseerd op industriële robots, wat de robuustheid en betrouwbaarheid garandeert die nodig is voor industriële toepassingen. Afhankelijk van de behoeften kunnen de CR-robots worden voorzien van een FANUC Vision Sensor of een FANUC 3D Area Sensor, waardoor ze stukken kunnen vinden of zien.
De collaborative robots van FANUC zijn gebaseerd op industriële robots, wat de robuustheid en betrouwbaarheid garandeert die nodig is voor industriële toepassingen. Afhankelijk van de behoeften kunnen de CR-robots worden voorzien van een FANUC Vision Sensor of een FANUC 3D Area Sensor, waardoor ze stukken kunnen vinden of zien.
De CR-35iA heeft een hefkracht tot 35 kg. Andere robots in de reeks zijn de CR-4iA, CR-7iA en de CR-15iA.
YuMi
 YuMi is een collaborative robot met twee armen bedoeld voor de assemblage van kleine componenten. De robot heeft flexibele grijpers en een geïntegreerd visiesysteem om componenten te lokaliseren. De robot is gebouwd om samen te werken met mensen en kan makkelijk in een werkstation geïntegreerd worden.
YuMi is een collaborative robot met twee armen bedoeld voor de assemblage van kleine componenten. De robot heeft flexibele grijpers en een geïntegreerd visiesysteem om componenten te lokaliseren. De robot is gebouwd om samen te werken met mensen en kan makkelijk in een werkstation geïntegreerd worden.
In 2018 breidde ABB de YuMi familie uit met een single-arm cobot die net als de originele robot met 2 armen een payload heeft van 0,5 kg.
Gebruiksvriendelijk met offline simulatie
 De AUBO-i5 werkt samen met de operator zonder een hekwerk, lasers of sensoren. De robot neemt lastige of zeer repetitieve taken over van de operator, waardoor deze zich kan richten op het toevoegen van waarde aan het productieproces. De robot is gebruiksvriendelijk opgezet met offline simulatie met behulp van een tablet. Het vergt geen programmeerkennis om deze robot eenvoudig aan te passen.
De AUBO-i5 werkt samen met de operator zonder een hekwerk, lasers of sensoren. De robot neemt lastige of zeer repetitieve taken over van de operator, waardoor deze zich kan richten op het toevoegen van waarde aan het productieproces. De robot is gebruiksvriendelijk opgezet met offline simulatie met behulp van een tablet. Het vergt geen programmeerkennis om deze robot eenvoudig aan te passen.
De AUBO-i5 heeft een payload van 5kg en een bereik van 924mm.
APAS
 De APAS robot van Bosch valt meteen op door zijn lederen bekleding. Deze bevat tactiele sensoren die elke aanraking detecteren. De robot is ook uitgerust met een scanner die de snelheid verlaagt zodra iemand de perimeter van de machine betreedt. Verder wordt een 2D of 3D visiesysteem ingebouwd om componenten te herkennen.
De APAS robot van Bosch valt meteen op door zijn lederen bekleding. Deze bevat tactiele sensoren die elke aanraking detecteren. De robot is ook uitgerust met een scanner die de snelheid verlaagt zodra iemand de perimeter van de machine betreedt. Verder wordt een 2D of 3D visiesysteem ingebouwd om componenten te herkennen.Botsingsmeetset PROBms
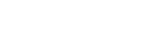
 Voor de validatie van applicaties met collaborative robots volgens ISO/TS 15066 ontwikkelde Pilz de botsingsmeetset PROBms.
Voor de validatie van applicaties met collaborative robots volgens ISO/TS 15066 ontwikkelde Pilz de botsingsmeetset PROBms.
De botsingsmeter is uitgerust met veren en sensoren voor het meten van de krachten die op het menselijk lichaam inwerken. Met behulp van drukmeetfolies wordt de lokale druk gemeten.
Voor de validering en digitalisering van de krachtmeetwaarden en voor het opstellen van testrapporten is een comfortabele softwaretool beschikbaar.
Meer dan 25.000 productieomgevingen
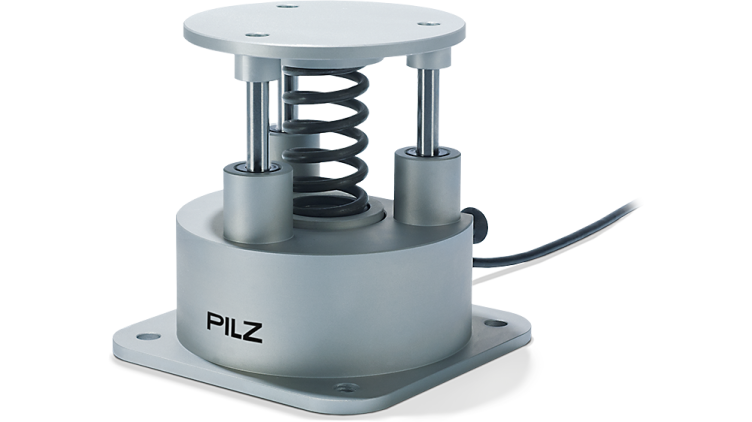
 De robots van het Deense Universal Robots - UR3, UR5 en UR10 - hebben een compact en lichtgewicht design met 6 scharnierpunten. De robotarmen zijn ontworpen om het bewegingsbereik van een mensenarm na te bootsen. Universal Robots is marktleider in collaborative robots met toepassingen in meer dan 25.000 productieomgevingen.
De robots van het Deense Universal Robots - UR3, UR5 en UR10 - hebben een compact en lichtgewicht design met 6 scharnierpunten. De robotarmen zijn ontworpen om het bewegingsbereik van een mensenarm na te bootsen. Universal Robots is marktleider in collaborative robots met toepassingen in meer dan 25.000 productieomgevingen.
Het gamma van Universal Robots werd onlangs uitgebreid met de high-end UR e-reeks.
Mobiel compatibele cobots
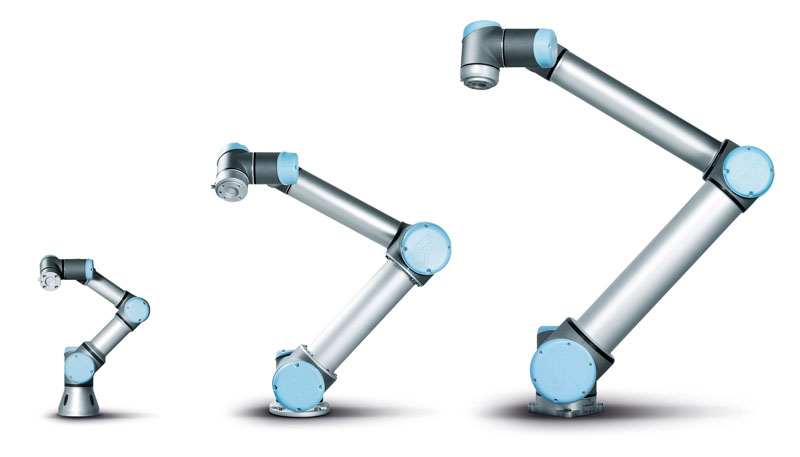
 Omron heeft een samenwerking met Techman Robot om diens collaborative robots co-branded op de markt te brengen. Het gaat om de TM5 (met een laadvermogen tot 6 kg) en de nieuwe TM12/TM14 (met een laadvermogen tot 14 kg).
Omron heeft een samenwerking met Techman Robot om diens collaborative robots co-branded op de markt te brengen. Het gaat om de TM5 (met een laadvermogen tot 6 kg) en de nieuwe TM12/TM14 (met een laadvermogen tot 14 kg).
Alle TM-robots hebben zes vrijheidsgraden en een armbereik van 700 tot 1300 mm.
Daarnaast wordt een nieuwe 'mobiel compatibele' reeks ontwikkeld voor integratie in de LD mobiele robots van Omron
Grijper voor collaborative robots
 De Co-act EGP-C is een elektrische grijper ontwikkeld voor gebruik in collaborative toepassingen, waar mens en machine samenwerken. De grijper is snel en eenvoudig te integreren met een robot interface die direct inzetbaar is op collaborative robots van KUKA, Fanuc en Universal Robots. Geïntegreerde LEDs geven de operator inzicht in de status van de processen. De grijper past zijn kracht automatisch aan en is DGUV-gecertificeerd voor collaborative toepassingen.
De Co-act EGP-C is een elektrische grijper ontwikkeld voor gebruik in collaborative toepassingen, waar mens en machine samenwerken. De grijper is snel en eenvoudig te integreren met een robot interface die direct inzetbaar is op collaborative robots van KUKA, Fanuc en Universal Robots. Geïntegreerde LEDs geven de operator inzicht in de status van de processen. De grijper past zijn kracht automatisch aan en is DGUV-gecertificeerd voor collaborative toepassingen.Thuis in elke werkomgeving
 De LBR iisy van KUKA is ontworpen om zeer gebruiksvriendelijk te zijn, zowel voor experten in automatisering als voor operatoren met een minimum aan training. De cobot heeft alle eigenschappen van een industriële robot maar is ook bedoeld om snel ingezet en aangepast te kunnen worden.
De LBR iisy van KUKA is ontworpen om zeer gebruiksvriendelijk te zijn, zowel voor experten in automatisering als voor operatoren met een minimum aan training. De cobot heeft alle eigenschappen van een industriële robot maar is ook bedoeld om snel ingezet en aangepast te kunnen worden.
Naast de uitgebreide programmeeromgeving voor experten biedt de nieuwe grafische user interface een snelle en intuïtieve manier om sequenties te parametriseren zonder kennis van programmatie.
Programmatie via Smart HUB
 De Motoman HC10 van Yaskawa combineert een bereik van 1,2 meter met een hefkracht van 10 kg. De collaborative robot kan op een gebruiksvriendelijke manier geprogrammeerd worden via de Smart HUB, die is geïntegreerd in de EasyTeach software. De robot is echter ook compatibel met andere modellen van Motoman, zowel wat controle als hardware betreft. De interne bekabeling en het wegvallen van de nood aan verdere afscherming maken dat de HC10 bijzonder weinig plaats inneemt.
De Motoman HC10 van Yaskawa combineert een bereik van 1,2 meter met een hefkracht van 10 kg. De collaborative robot kan op een gebruiksvriendelijke manier geprogrammeerd worden via de Smart HUB, die is geïntegreerd in de EasyTeach software. De robot is echter ook compatibel met andere modellen van Motoman, zowel wat controle als hardware betreft. De interne bekabeling en het wegvallen van de nood aan verdere afscherming maken dat de HC10 bijzonder weinig plaats inneemt.Stevige, eenarmige co-worker
De Sawyer robot van Rethink Robotics werd na de overname door de HAHN Group aangepast om de performantie en nauwkeurigheid aan te passen aan industriële normen. Daarbij werd met name het concept van de elastische actuatoren herbekeken.De robot heeft een geïntegreerd Cognex visiesysteem, weegt 19 kg en heeft een hefkracht van 4 kg. Het bereik bedraagt 1 meter.
Elke van de 7 assen is uitgerust met krachtopnemers.
Interactieve grijper voor cobots
De co-act grijper JL1 van Schunk sleepte op de Hannover Messe 2017 de Hermes award in de wacht. De grijper is speciaal ontwikkeld voor cobots. De vormgeving combineert een grote flexibiliteit met de garantie dat een operator zich geen pijn kan doen. Sensoren detecteren wanneer er contact is met een mens. De grijper kan over zijn omgeving communiceren met een PLC. Gekleurde LEDs en een display garanderen een interactieve samenwerking tussen mens en machine.Industriële snelheden
 De Racer-5 COBOT van het Italiaanse Comau is ontworpen om zowel een collaboratieve als een industriële robot te zijn. Met een 5 kg payload en 809 mm reikwijdte haalt hij snelheden tot 6 m/s en een herhaalnauwkeurigheid van 0,03 mm.
De Racer-5 COBOT van het Italiaanse Comau is ontworpen om zowel een collaboratieve als een industriële robot te zijn. Met een 5 kg payload en 809 mm reikwijdte haalt hij snelheden tot 6 m/s en een herhaalnauwkeurigheid van 0,03 mm.Lichtgewicht robot voor gevoelige montagewerkzaamheden
 De LBR iiwa is de eerste in serie geproduceerde, gevoelige robot. LBR staat voor "Leichtbauroboter", iiwa staat voor "intelligent industrial work assistant".
De LBR iiwa is de eerste in serie geproduceerde, gevoelige robot. LBR staat voor "Leichtbauroboter", iiwa staat voor "intelligent industrial work assistant".
De collaboratieve en gevoelige robot LBR iiwa bestaat in twee varianten met draaglasten van 7 en 14 kg.
Dankzij krachtenmoment-sensoren herkent de LBR iiwa contacten onmiddellijk en reduceert hij tegelijk de kracht en snelheid. Gevoelige componenten hanteert hij dankzij de positie- en soepelheidsregeling zonder klem- en snijgevaar.
Organische robot
 Catbot is een cobot die door de Chinese fabrikant Elephant Robotics een organische robot genoemd wordt. De benaming verwijst naar de natuurlijke manier van interactie, onder meer via voice control. De fabrikant mikt op een breed gamma aan toepassingen voor persoonlijk gebruik, waaronder het geven van massages, maar er wordt ook een hele reeks standaard tools aangeboden voor industriële toepassingen, waaronder een adaptieve grijper, schroevendraaier en een tool voor polijsten.
Catbot is een cobot die door de Chinese fabrikant Elephant Robotics een organische robot genoemd wordt. De benaming verwijst naar de natuurlijke manier van interactie, onder meer via voice control. De fabrikant mikt op een breed gamma aan toepassingen voor persoonlijk gebruik, waaronder het geven van massages, maar er wordt ook een hele reeks standaard tools aangeboden voor industriële toepassingen, waaronder een adaptieve grijper, schroevendraaier en een tool voor polijsten.Real-time 3D monitoring
De C-5 en C-15 van het Canadese ESI zijn twee nieuwe collaborative robots met payloads van respectievelijk 5 en 15 kg. Het bedrijf heeft een bijgaand 3D monitoring systeem ontwikkeld dat in real-time de afstand tussen de robot en mensen of andere objecten bewaakt en waar nodig de snelheid verlaagt.Met de C-7 biedt ESI een collaborative robotarm voor gebruik in Ex-zones.
TX2: built for Industrie 4.0
 De TX2 reeks van Stäubli combineert alle eigenschappen van een industriële robot met extra veiligheidsfuncties als Safe Speed, Safe Tool, Safe Stop en Safe Zone. Deze functies maken alle aspecten van Man Robot Collaboration mogelijk, terwijl de robot bij afwezigheid van mensen aan de snelheid van een industriële robot kan werken.
De TX2 reeks van Stäubli combineert alle eigenschappen van een industriële robot met extra veiligheidsfuncties als Safe Speed, Safe Tool, Safe Stop en Safe Zone. Deze functies maken alle aspecten van Man Robot Collaboration mogelijk, terwijl de robot bij afwezigheid van mensen aan de snelheid van een industriële robot kan werken.
De TX2 modellen worden aangeboden in 3 families: TX2-40, TX2-60 en TX2-90 — met een bereik gaande van 515 tot 1,450 mm.
© Productivity.be